PX4固件调试步骤
1.地面站选用
QGC地面站。下载连接https://qgroundcontrol.com/
mp地面站。下载连接
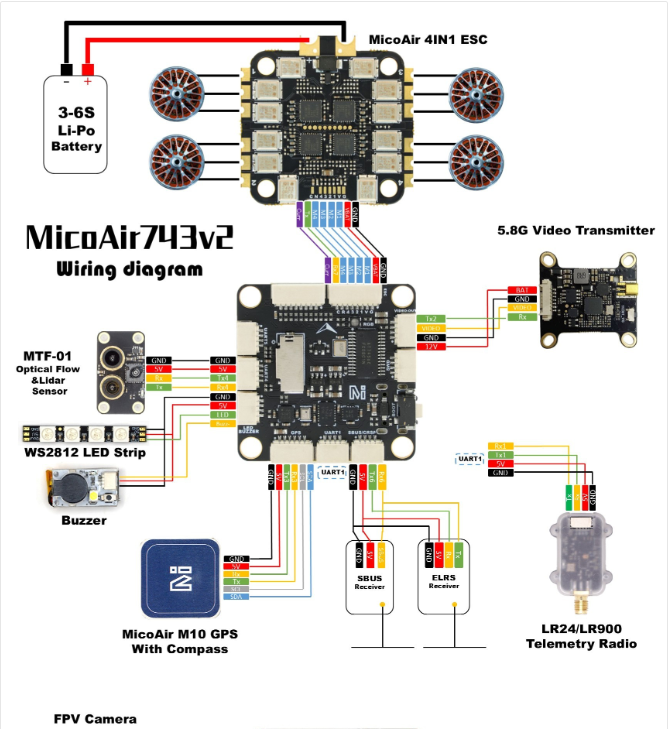
2.连接飞机
数据线一定要使用带有传输数据功能的,接头合适数据线
安装驱动(具体查询官网或者咨询商家)
3.地面站调试
开源或者国外地面站均为英文菜单,可以上找汉化版本,也可以边翻译边使用
QGC最新版自带中文语言,自行切换
连接飞控:端口号要选对,波特率要选对,端口号可以插拔数据线刷新看是哪个,波特率要问商家
进入调试界面,按步骤开始调试:
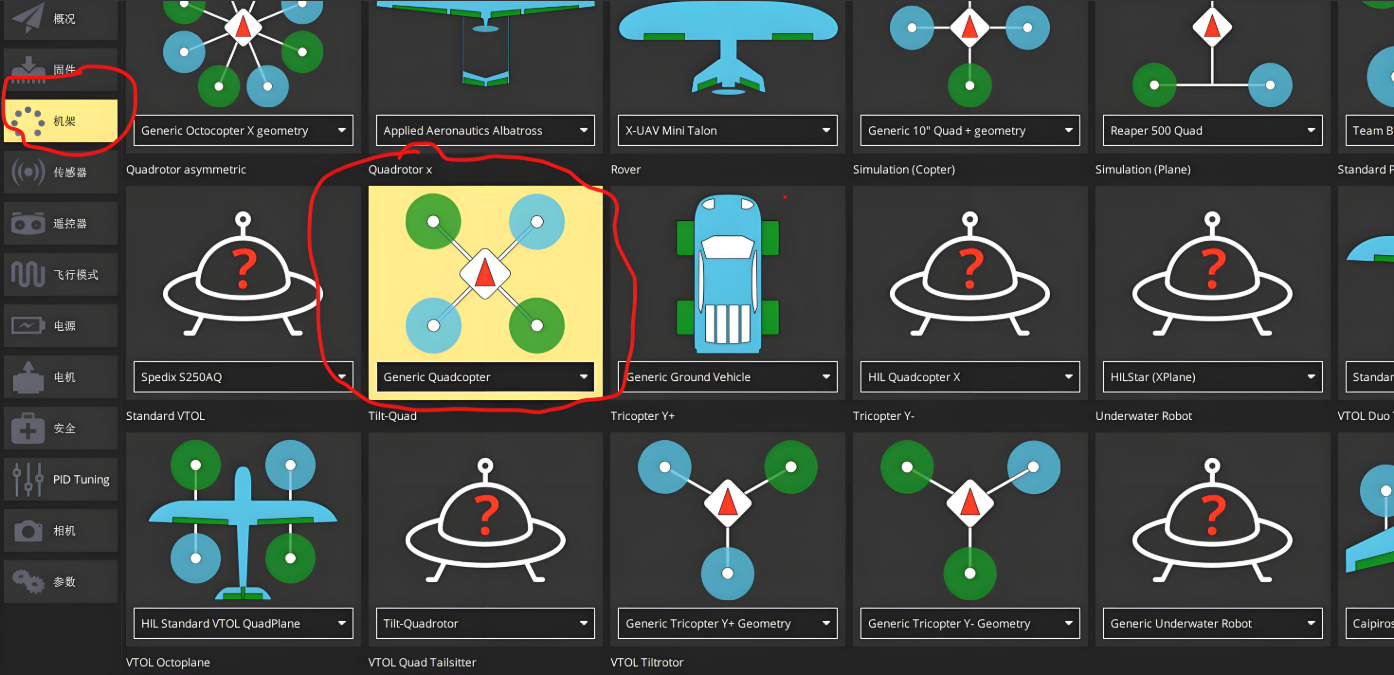
1.选择机架:选择对应自己的机架类型,飞控固件要与机架类型所对应上
2.校准传感器:
罗盘(指南针):飞控内部,GPS都有罗盘,校准时要注意校准的是哪个罗盘,在QGC上软件会自动选择,根据图解进行相应的动作,mp上需要根据经验每个方向转一圈,等进度条走完。

加速度计:每个方向都校准一遍,根据地面站图解步骤
陀螺仪:根据地面站图解校准
地平线:根据地面站图解校准
3.校准遥控器
目的是校准飞控上的行程量与遥控器所匹配,根据图解走
4.设置飞行模式
先选择切换模式的拨杆或通道,以下是QGC地面站模式的定义
Manual(手动模式)
描述: 最基础的模式。飞控只保持无人机自稳( Stabilized ,不让它翻过去),但不进行位置控制。油门直接控制电机转速。遥控器杆量直接对应无人机的姿态。 需要飞行员有较好的操作技巧。
风险: 松开摇杆无人机不会刹车,会随风飘走。新手慎用。
Stabilized(自稳模式)
描述: 与Manual模式非常相似,飞控保持机体水平。不同之处在于,居中摇杆会使无人机恢复水平(但不保持位置)。是比Manual更友好一些的手动模式。
Altitude(高度模式)
描述: 半自动模式。飞行员控制前后、左右(俯仰和横滚)的移动,但飞控会自动保持当前高度。油门杆控制的是上升/下降速率。松开油门杆,无人机保持高度。这是学习飞行的理想模式。
Position(位置模式)
描述: 新手和安全飞行的首选模式。 飞控利用GPS和气压计,自动保持三维位置和高度。摇杆控制的是无人机向前/后、左/右的速度。松开摇杆,无人机会原地悬停。抗风性好。
Position Slow(慢速位置模式)
描述: 与Position模式相同,但限制了最大倾斜角和速度,让飞行更加平稳、缓慢。非常适合在狭小空间或近距离拍摄时使用。
Offboard(外部模式)
描述: 高级模式。 在此模式下,飞控不再自主控制,而是接收来自机载计算机(如树莓派、Jetson)通过MAVLink消息发送的期望位置、速度或姿态指令。用于自主导航、计算机视觉等高级应用。
Acro(特技模式)
描述: 纯手动模式,用于花飞和特技。 飞控完全关闭自稳功能。摇杆直接控制无人机的角速率。可以完成翻滚、环绕等动作。难度最高,需要大量练习。
自动任务模式
Mission(任务模式)
描述: 完全自动模式。飞控执行在地面站(如QGC)上预先规划好的航点任务(包括起飞、航点、动作、着陆等)。起飞后,无人机将自动按计划飞行。
Takeoff(起飞模式)
描述: 自动起飞。无人机会爬升到预设的高度并悬停。
Land(降落模式)
描述: 自动降落。无人机会在当前垂直下方位置自动着陆并上锁。
Hold(悬停模式)
描述: 自动悬停。无人机会立即在当前GPS位置和高度悬停。用于暂停当前任务或稳定无人机以进行调试。
Return(返航模式)
描述: 重要的安全模式。 无人机将自动返回并降落在“家”位置(通常是解锁起飞时记录的点)。通常在遥控器信号丢失或低电量时自动触发,也可手动切换。
Follow Me(跟随模式)
描述: 无人机使用地面站设备(手机或遥控器)的GPS信号,自动跟随飞行员移动。
Precision Land(精准降落模式)
描述: 在自动降落时,使用机载的光流或视觉摄像头识别地面标记,以实现厘米级精度的着陆。通常需要额外的传感器。
5.校准电调
两种方法,一种是地面站直接校准,一种是用遥控器校准。
6.测试电机
测试正反转,电机的序号是否正确。
7.飞行故障设置
设置飞行过程中飞机出现故障时执行的指令
8.外场试飞:
1.测试电池电量
2.检查飞行器机臂是否牢固
3.桨叶是否破损
4.是否有打到电线的风险
5.第一次起飞一定要使用姿态模式起飞
6.起飞脚架离地后检查舵面是否正常
7.舵面正常后拉升高度,切gps模式
8.gps模式没问题后方可正常飞行,检查其他模式